Improving the Reliability of Probabilistic Multi-Step-Ahead Flood Forecasting by Fusing Unscented Kalman Filter with Recurrent Neural Network




Abstract
:1. Introduction
2. Methods
2.1. Deterministic Flood Forecast Models Based on Artificial Neural Network (ANN)
2.2. Probabilistic Forecasting Based on the Unscented Kalman Filter (UKF)
2.3. Evaluation Indicators
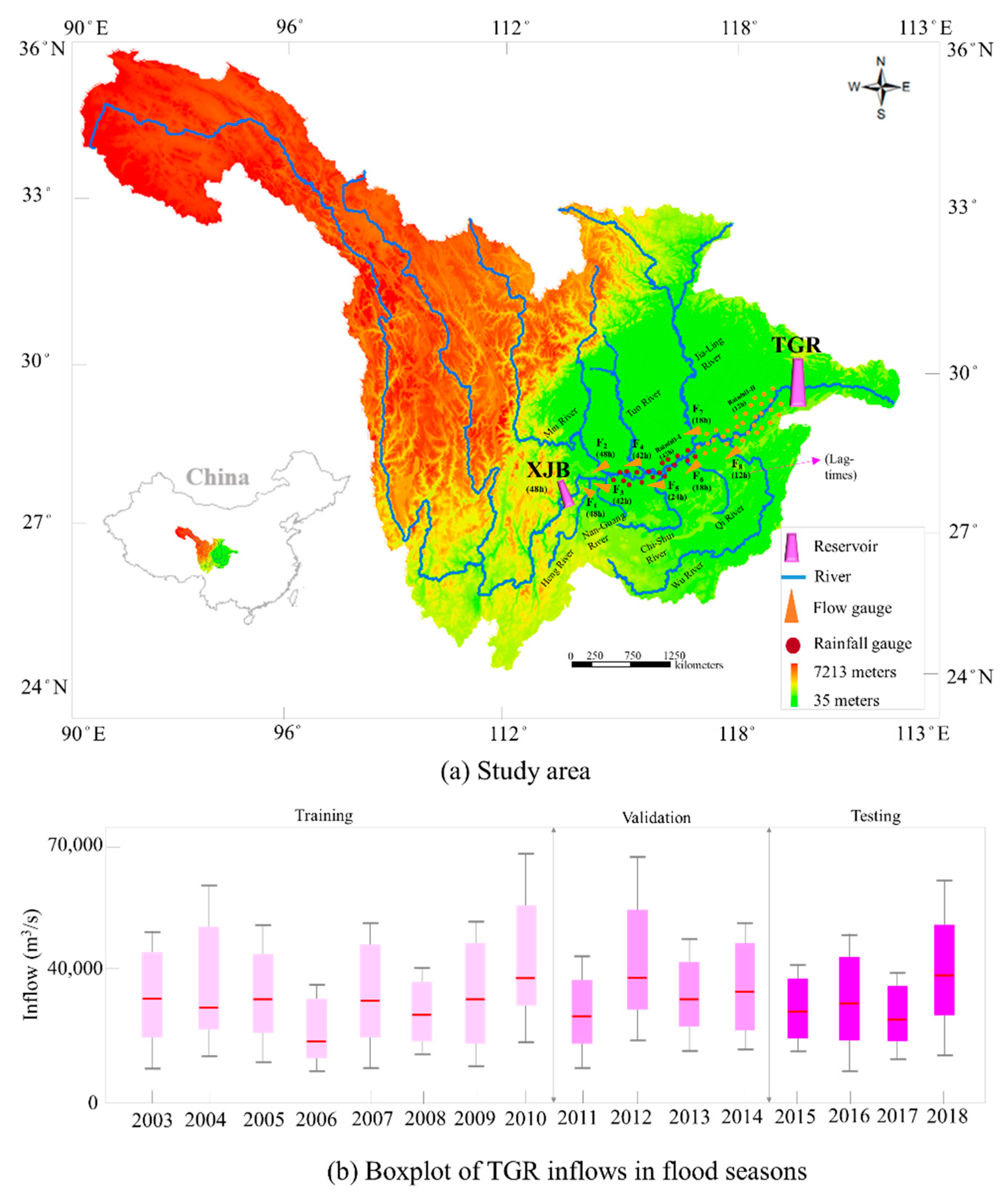
3. Study Area and Materials
4. Results and Discussion
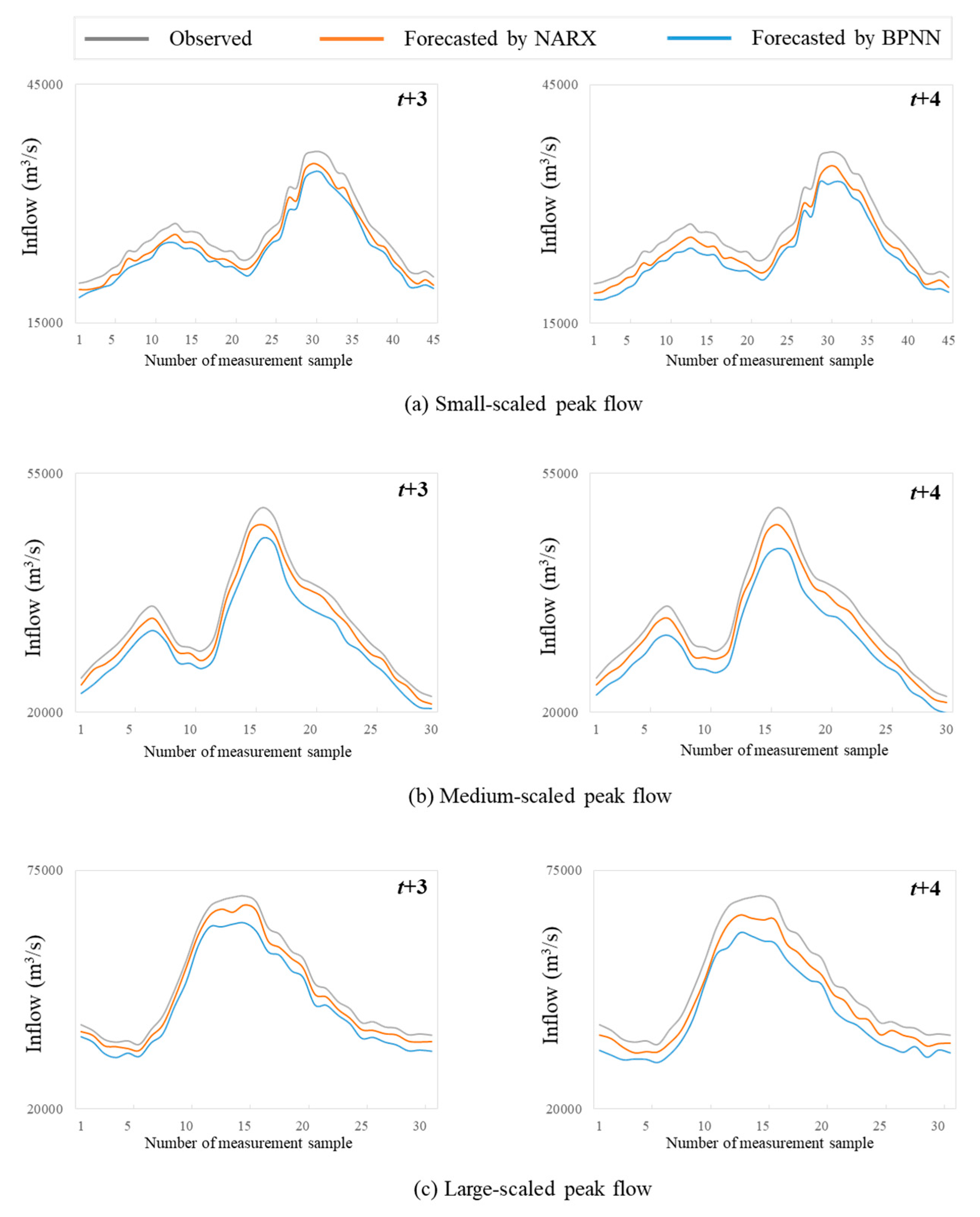
4.1. Performance of Deterministic Flood Forecasts
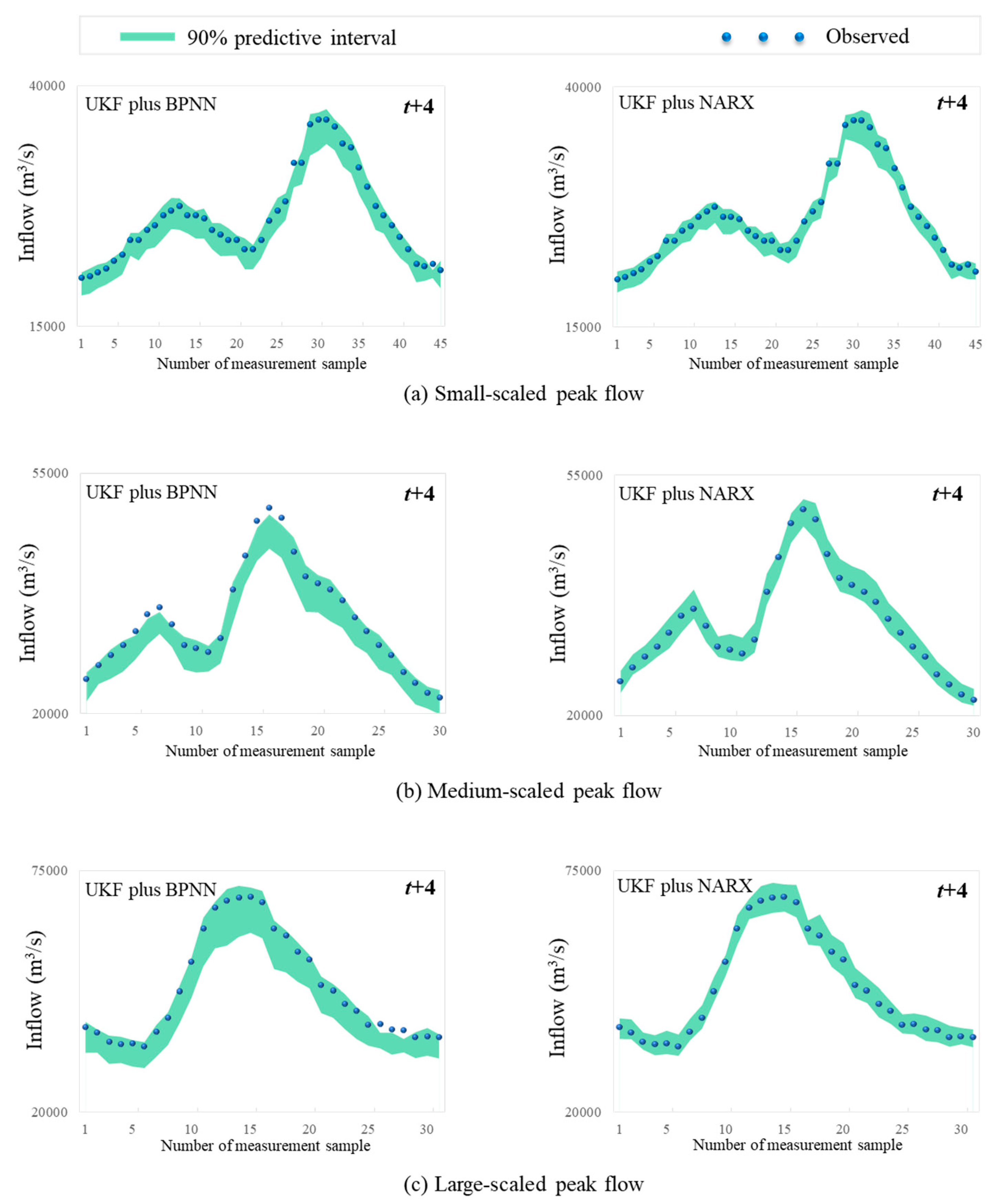
4.2. Probabilistic Flood Forecasting Performance
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gneiting, T.; Balabdaoui, F.; Raftery, A.E. Probabilistic forecasts, calibration and sharpness. J. R. Stat. Soc. Ser. B (Stat. Methodol.) 2007, 69, 243–268. [Google Scholar] [CrossRef] [Green Version]
- Han, S.; Coulibaly, P. Bayesian flood forecasting methods: A review. J. Hydrol. 2017, 551, 340–351. [Google Scholar] [CrossRef]
- Wetterhall, F.; Pappenberger, F.; Alfieri, L.; Cloke, H.L.; Thielen-del Pozo, J.; Balabanova, S.; Danhelka, J.; Vogelbacher, A.; Salamon, P.; Carrasco, I.; et al. HESS Opinions: Forecaster priorities for improving probabilistic flood forecasts. Hydrol. Earth Syst. Sci. 2013, 17, 4389–4399. [Google Scholar] [CrossRef] [Green Version]
- Arnal, L.; Ramos, M.H.; Perez, E.C.D.; Cloke, H.L.; Stephens, E.; Wetterhall, F.; van Andel, S.J.; Pappenberger, F. Willingness-to-pay for a probabilistic flood forecast: A risk-based decision-making game. Hydrol. Earth Syst. Sci. 2016, 20, 3109–3128. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Laio, F.; Tamea, S. Verification tools for probabilistic forecasts of continuous hydrological variables. Hydrol. Earth Syst. Sci. 2007, 11, 1267–1277. [Google Scholar] [CrossRef] [Green Version]
- Herr, H.D.; Krzysztofowicz, R. Ensemble Bayesian forecasting system Part I: Theory and algorithms. J. Hydrol. 2015, 524, 789–802. [Google Scholar] [CrossRef]
- Zhou, Y.; Guo, S. Risk analysis for flood control operation of seasonal flood-limited water level incorporating inflow forecasting error. Hydrol. Sci. J. 2014, 59, 1006–1019. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Guo, S.; Chang, F.J.; Liu, P.; Chen, A.B. Methodology that improves water utilization and hydropower generation without increasing flood risk in mega cascade reservoirs. Energy 2018, 143, 785–796. [Google Scholar] [CrossRef]
- Madadgar, S.; Moradkhani, H. Improved Bayesian multimodeling: Integration of copulas and Bayesian model averaging. Water Resour. Res. 2014, 50, 9586–9603. [Google Scholar] [CrossRef] [Green Version]
- Papacharalampous, G.A.; Tyralis, H.; Koutsoyiannis, D. Comparison of stochastic and machine learning methods for multi-step ahead forecasting of hydrological processes. Stoch. Environ. Res. Risk Assess. 2019, 33, 481–514. [Google Scholar] [CrossRef]
- Engeland, K.; Steinsland, I. Probabilistic postprocessing models for flow forecasts for a system of catchments and several lead times. Water Resour. Res. 2014, 50, 182–197. [Google Scholar] [CrossRef]
- Krapu, C.; Borsuk, M. Probabilistic programming: A review for environmental modellers. Environ. Model. Softw. 2019, 114, 40–48. [Google Scholar] [CrossRef]
- Todini, E. From HUP to MCP: Analogies and extended performances. J. Hydrol. 2013, 477, 33–42. [Google Scholar] [CrossRef]
- Siccardi, F.; Boni, G.; Ferraris, L.; Rudari, R.O.B.E.R.T.O. A hydrometeorological approach for probabilistic flood forecast. J. Geophys. Res.: Atmos. 2005, 110. [Google Scholar] [CrossRef]
- Liu, Z.; Guo, S.; Xiong, L.; Xu, C.Y. Hydrological uncertainty processor based on a copula function. Hydrol. Sci. J. 2018, 63, 74–86. [Google Scholar] [CrossRef]
- Julier, S.J.; UHlmann, J.K. A new extension of the Kalman filter to nonlinear systems. Aerosense 1997, 97, 182–193. [Google Scholar]
- Bosov, A.V.; Miller, G.B. Conditionally minimax nonlinear filter and Unscented Kalman filter: Empirical analysis and comparison. Autom. Remote. Control. 2019, 80, 1230–1251. [Google Scholar] [CrossRef]
- Jiang, P.; Sun, Y.; Bao, W. State estimation of conceptual hydrological models using unscented Kalman filter. Hydrol. Res. 2019, 50, 479–497. [Google Scholar] [CrossRef] [Green Version]
- Kanakaraj, S.; Nair, M.S.; Kalady, S. Adaptive Importance Sampling Unscented Kalman Filter based SAR image super resolution. Comput. Geosci. 2019, 133, 104310. [Google Scholar] [CrossRef]
- Fu, X.; Yu, Z.; Ding, Y.; Qin, Y.; Luo, L.; Zhao, C.; Yang, C. Unscented weighted ensemble Kalman filter for soil moisture assimilation. J. Hydrol. 2019, 580, 124352. [Google Scholar] [CrossRef]
- Wu, X.; Wang, Y. Extended and Unscented Kalman filtering based feedforward neural networks for time series prediction. Appl. Math. Model. 2012, 36, 1123–1131. [Google Scholar] [CrossRef]
- Wang, X.; Babovic, V. Application of hybrid Kalman filter for improving water level forecast. J. Hydroinf. 2016, 18, 773–790. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.-L.; Xiang, X.-H.; Wang, C.-H.; Chen, X.; Xu, C.-Y.; Yu, Z. Coupled hydraulic and Kalman Filter model for real-time correction of flood forecast in the Three Gorges interzone of Yangtze River, China. J. Hydro. Eng. 2013, 18, 1416–1425. [Google Scholar] [CrossRef]
- Zhang, X.; Liang, F.; Yu, B.; Zong, Z. Explicitly integrating parameter, input, and structure uncertainties into Bayesian Neural Networks for probabilistic hydrologic forecasting. J. Hydrol. 2011, 409, 696–709. [Google Scholar] [CrossRef]
- Zhu, F.; Zhong, P.A.; Sun, Y.; Yeh, W.W.G. Real-time optimal flood control decision making and risk propagation under multiple uncertainties. Water Resour. Res. 2017, 53, 10635–10654. [Google Scholar] [CrossRef] [Green Version]
- Abrahart, R.J.; Anctil, F.; Coulibaly, P.; Dawson, C.W.; Mount, N.J.; See, L.M.; Wilby, R.L. Two decades of anarchy? Emerging themes and outstanding challenges for neural network river forecasting. Prog. Phys. Geogr. 2012, 36, 480–513. [Google Scholar] [CrossRef]
- Shen, C.; Laloy, E.; Elshorbagy, A.; Albert, A.; Bales, J.; Chang, F.J.; Ganguly, S.; Hsu, K.L.; Kifer, D.; Fang, Z.; et al. HESS Opinions: Incubating deep-learning-powered hydrologic science advances as a community. Hydrol. Earth Syst. Sci. 2018, 22, 5639–5656. [Google Scholar] [CrossRef] [Green Version]
- Asanjan, A.A.; Yang, T.; Hsu, K.; Sorooshian, S.; Lin, J.; Peng, Q. Short-term precipitation forecast based on the PERSIANN system and the long short-term memory (LSTM) deep learning algorithm. J. Geophys. Res.: Atmos. 2018, 123, 12543–12563. [Google Scholar]
- Bui, D.T.; Panahi, M.; Shahabi, H.; Singh, V.P.; Shirzadi, A.; Chapi, K.; Ahmad, B.B. Novel hybrid evolutionary algorithms for spatial prediction of floods. Sci. Rep. 2018, 8, 15364. [Google Scholar] [CrossRef] [Green Version]
- Cannon, A.J. Quantile regression neural networks: Implementation in R and application to precipitation downscaling. Comput. Geosci. 2011, 37, 1277–1284. [Google Scholar] [CrossRef]
- Chang, F.J.; Chen, P.A.; Lu, Y.R.; Huang, E.; Chang, K.Y. Real-time multi-step-ahead water level forecasting by recurrent neural networks for urban flood control. J. Hydrol. 2014, 517, 836–846. [Google Scholar] [CrossRef]
- Chang, F.J.; Tsai, M.J. A nonlinear spatio-temporal lumping of radar rainfall for modeling multi-step-ahead inflow forecasts by data-driven techniques. J. Hydrol. 2016, 535, 256–269. [Google Scholar] [CrossRef]
- Chen, P.A.; Chang, L.C.; Chang, F.J. Reinforced recurrent neural networks for multi-step-ahead flood forecasts. J. Hydrol. 2013, 497, 71–79. [Google Scholar] [CrossRef]
- Chen, L.; Sun, N.; Zhou, C.; Zhou, J.; Zhou, Y.; Zhang, J.; Zhou, Q. Flood forecasting based on an improved extreme learning machine model combined with the backtracking search optimization algorithm. Water 2018, 10, 1362. [Google Scholar] [CrossRef] [Green Version]
- Hu, C.; Wu, Q.; Li, H.; Jian, S.; Li, N.; Lou, Z. Deep learning with a long short-term memory networks approach for rainfall-runoff simulation. Water 2018, 10, 1543. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Chang, F.J.; Chang, L.C.; Kao, I.F.; Wang, Y.S. Explore a deep learning multi-output neural network for regional multi-step-ahead air quality forecasts. J. Clean. Prod. 2019, 209, 134–145. [Google Scholar] [CrossRef]
- Zhou, Y.; Guo, S.; Chang, F.J. Explore an evolutionary recurrent ANFIS for modelling multi-step-ahead flood forecasts. J. Hydrol. 2019, 570, 343–355. [Google Scholar] [CrossRef]
- Kasiviswanathan, K.S.; Sudheer, K.P.; He, J. Probabilistic and ensemble simulation approaches for input uncertainty quantification of artificial neural network hydrological models. Hydrol. Sci. J. 2018, 63, 101–113. [Google Scholar] [CrossRef]
- Kumar, S.; Tiwari, M.K.; Chatterjee, C.; Mishra, A. Reservoir inflow forecasting using ensemble models based on neural networks, wavelet analysis and bootstrap method. Water Resour. Manag. 2015, 29, 4863–4883. [Google Scholar] [CrossRef]
- Zhong, Y.; Guo, S.; Ba, H.; Xiong, F.; Chang, F.J.; Lin, K. Evaluation of the BMA probabilistic inflow forecasts using TIGGE numeric precipitation predictions based on artificial neural network. Hydrol. Res. 2018, 49, 1417–1433. [Google Scholar] [CrossRef]
- Shen, H.Y.; Chang, L.C. Online multistep-ahead inundation depth forecasts by recurrent NARX networks. Hydrol. Earth Syst. Sci. 2013, 17, 935–945. [Google Scholar] [CrossRef] [Green Version]
- Wunsch, A.; Liesch, T.; Broda, S. Forecasting groundwater levels using nonlinear autoregressive networks with exogenous input (NARX). J. Hydrol. 2018, 567, 743–758. [Google Scholar] [CrossRef]
- Lourakis, M.I. A brief description of the Levenberg-Marquardt algorithm implemented by Levmar. Found. Res. Technol. 2005, 4, 1–6. [Google Scholar]
- Nanda, T.; Sahoo, B.; Beria, H.; Chatterjee, C. A wavelet-based non-linear autoregressive with exogenous inputs (WNARX) dynamic neural network model for real-time flood forecasting using satellite-based rainfall products. J. Hydrol. 2016, 539, 57–73. [Google Scholar] [CrossRef]
- Lohani, A.K.; Goel, N.K.; Bhatia, K.K.S. Improving real time flood forecasting using fuzzy inference system. J. Hydrol. 2014, 509, 25–41. [Google Scholar] [CrossRef]
- Nash, J.E. River flow forecasting through conceptual models, I: A discussion of principles. J. Hydrol. 1970, 10, 398–409. [Google Scholar] [CrossRef]
- Gneiting, T.; Raftery, A.E. Strictly Proper Scoring Rules, Prediction, and Estimation. J. Am. Stat. Assoc. 2007, 102, 359–378. [Google Scholar] [CrossRef]
- Xiong, L.; O’Connor, K.M. An empirical method to improve the prediction limits of the GLUE methodology in rainfall-runoff modeling. J. Hydrol. 2008, 349, 115–124. [Google Scholar] [CrossRef]
- Bai, Y.; Chen, Z.; Xie, J.; Li, C. Daily reservoir inflow forecasting using multiscale deep feature learning with hybrid models. J. Hydrol. 2016, 532, 193–206. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, Y.; Zhou, J.; Singh, V.P.; Guo, S.; Zhang, J. Real-time error correction method combined with combination flood forecasting technique for improving the accuracy of flood forecasting. J. Hydrol. 2015, 521, 157–169. [Google Scholar] [CrossRef]
- Maidment, D.R. Handbook of Hydrology; McGraw-Hill: New York, NY, USA, 1993. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage | Model | Indicator | Horizon | |||
|---|---|---|---|---|---|---|
| t + 1 | t + 2 | t + 3 | t + 4 | |||
| Training | NARX | PPTS (l, 2%) | 0.0293 | 0.0310 | 0.0332 | 0.0349 |
| PPTS (l, 5%) | 0.0314 | 0.0330 | 0.0355 | 0.0383 | ||
| PPTS (l, 10%) | 0.0334 | 0.0356 | 0.0393 | 0.0450 | ||
| PPTS (l, 20%) | 0.0366 | 0.0388 | 0.0429 | 0.0488 | ||
| MAE (m3/s) | 689 | 750 | 849 | 1037 | ||
| NSE | 0.980 | 0.969 | 0.963 | 0.942 | ||
| BPNN | PPTS (l, 2%) | 0.0293 | 0.0346 | 0.0364 | 0.0398 | |
| PPTS (l, 5%) | 0.0314 | 0.0447 | 0.0483 | 0.0512 | ||
| PPTS (l, 10%) | 0.0334 | 0.0546 | 0.0606 | 0.0616 | ||
| PPTS (l, 20%) | 0.0366 | 0.0601 | 0.0661 | 0.0672 | ||
| MAE (m3/s) | 689 | 951 | 1024 | 1295 | ||
| NSE | 0.980 | 0.935 | 0.907 | 0.858 | ||
| Validation | NARX | PPTS (l, 2%) | 0.0295 | 0.0314 | 0.0340 | 0.0361 |
| PPTS (l, 5%) | 0.0315 | 0.0334 | 0.0364 | 0.0397 | ||
| PPTS (l, 10%) | 0.0335 | 0.0354 | 0.0395 | 0.0438 | ||
| PPTS (l, 20%) | 0.0372 | 0.0399 | 0.0445 | 0.0491 | ||
| MAE (m3/s) | 716 | 782 | 919 | 1079 | ||
| NSE | 0.978 | 0.965 | 0.957 | 0.936 | ||
| BPNN | PPTS (l, 2%) | 0.0295 | 0.0432 | 0.0472 | 0.0493 | |
| PPTS (l, 5%) | 0.0315 | 0.0472 | 0.0515 | 0.0547 | ||
| PPTS (l, 10%) | 0.0335 | 0.0551 | 0.0606 | 0.0643 | ||
| PPTS (l, 20%) | 0.0372 | 0.0621 | 0.0690 | 0.0732 | ||
| MAE (m3/s) | 716 | 964 | 1088 | 1317 | ||
| NSE | 0.980 | 0.931 | 0.904 | 0.853 | ||
| Testing | NARX | PPTS (l, 2%) | 0.0305 | 0.0312 | 0.0332 | 0.0349 |
| PPTS (l, 5%) | 0.0320 | 0.0339 | 0.0365 | 0.0418 | ||
| PPTS (l, 10%) | 0.0343 | 0.0368 | 0.0411 | 0.0456 | ||
| PPTS (l, 20%) | 0.0374 | 0.0401 | 0.0448 | 0.0497 | ||
| MAE (m3/s) | 793 | 931 | 893 | 1006 | ||
| NSE | 0.978 | 0.967 | 0.961 | 0.940 | ||
| BPNN | PPTS (l, 2%) | 0.0305 | 0.0488 | 0.0536 | 0.0544 | |
| PPTS (l, 5%) | 0.0320 | 0.0511 | 0.0562 | 0.0571 | ||
| PPTS (l, 10%) | 0.0343 | 0.0582 | 0.0647 | 0.0686 | ||
| PPTS (l, 20%) | 0.0374 | 0.0635 | 0.0705 | 0.0749 | ||
| MAE (m3/s) | 793 | 992 | 1079 | 1259 | ||
| NSE | 0.978 | 0.929 | 0.872 | 0.821 | ||
| Stage | Model | Indicator | Horizon | |||
|---|---|---|---|---|---|---|
| t + 1 | t + 2 | t + 3 | t + 4 | |||
| Training | UKF plus NARX | CR (%) | 98.23 | 96.37 | 95.06 | 94.53 |
| RB | 0.08 | 0.10 | 0.13 | 0.17 | ||
| CRPS (m3/s) | 754 | 911 | 1092 | 1253 | ||
| UKF plus BPNN | CR (%) | 98.23 | 94.11 | 92.25 | 89.03 | |
| RB | 0.08 | 0.12 | 0.18 | 0.21 | ||
| CRPS (m3/s) | 754 | 1092 | 1361 | 1517 | ||
| Validation | UKF plus NARX | CR (%) | 98.21 | 96.32 | 95.00 | 94.37 |
| RB | 0.08 | 0.11 | 0.14 | 0.18 | ||
| CRPS (m3/s) | 789 | 934 | 1112 | 1274 | ||
| UKF plus BPNN | CR (%) | 98.21 | 93.07 | 91.21 | 88.06 | |
| RB | 0.08 | 0.13 | 0.19 | 0.23 | ||
| CRPS (m3/s) | 789 | 1118 | 1395 | 1576 | ||
| Testing | UKF plus NARX | CR (%) | 98.18 | 96.29 | 95.02 | 94.41 |
| RB | 0.09 | 0.10 | 0.13 | 0.17 | ||
| CRPS (m3/s) | 776 | 922 | 1104 | 1267 | ||
| UKF plus BPNN | CR (%) | 98.18 | 92.04 | 89.25 | 87.03 | |
| RB | 0.09 | 0.12 | 0.18 | 0.22 | ||
| CRPS (m3/s) | 776 | 1127 | 1412 | 1590 | ||
| Stage | Model | Indicator | Horizon | |||
|---|---|---|---|---|---|---|
| t + 1 | t + 2 | t + 3 | t + 4 | |||
| Training | NARX | MAE (m3/s) | 453 | 750 | 849 | 1037 |
| CRPS (m3/s) | 781 | 1025 | 1189 | 1306 | ||
| UKF plus NARX | MAE (m3/s) | 412 | 702 | 811 | 954 | |
| CRPS (m3/s) | 724 | 894 | 1064 | 1202 | ||
| Validation | NARX | MAE (m3/s) | 474 | 782 | 919 | 1079 |
| CRPS (m3/s) | 813 | 1106 | 1216 | 1390 | ||
| UKF plus NARX | MAE (m3/s) | 439 | 736 | 851 | 975 | |
| CRPS (m3/s) | 767 | 910 | 1097 | 1243 | ||
| Testing | NARX | MAE (m3/s) | 465 | 931 | 893 | 1006 |
| CRPS (m3/s) | 798 | 1035 | 1194 | 1354 | ||
| UKF plus NARX | MAE (m3/s) | 428 | 719 | 838 | 960 | |
| CRPS (m3/s) | 749 | 901 | 1082 | 1224 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Guo, S.; Xu, C.-Y.; Chang, F.-J.; Yin, J. Improving the Reliability of Probabilistic Multi-Step-Ahead Flood Forecasting by Fusing Unscented Kalman Filter with Recurrent Neural Network. Water 2020, 12, 578. https://doi.org/10.3390/w12020578
Zhou Y, Guo S, Xu C-Y, Chang F-J, Yin J. Improving the Reliability of Probabilistic Multi-Step-Ahead Flood Forecasting by Fusing Unscented Kalman Filter with Recurrent Neural Network. Water. 2020; 12(2):578. https://doi.org/10.3390/w12020578
Chicago/Turabian StyleZhou, Yanlai, Shenglian Guo, Chong-Yu Xu, Fi-John Chang, and Jiabo Yin. 2020. "Improving the Reliability of Probabilistic Multi-Step-Ahead Flood Forecasting by Fusing Unscented Kalman Filter with Recurrent Neural Network" Water 12, no. 2: 578. https://doi.org/10.3390/w12020578