Uncertainty Quantification of Landslide Generated Waves Using Gaussian Process Emulation and Variance-Based Sensitivity Analysis †

 , and
, and
Abstract
:1. Introduction
2. Methods
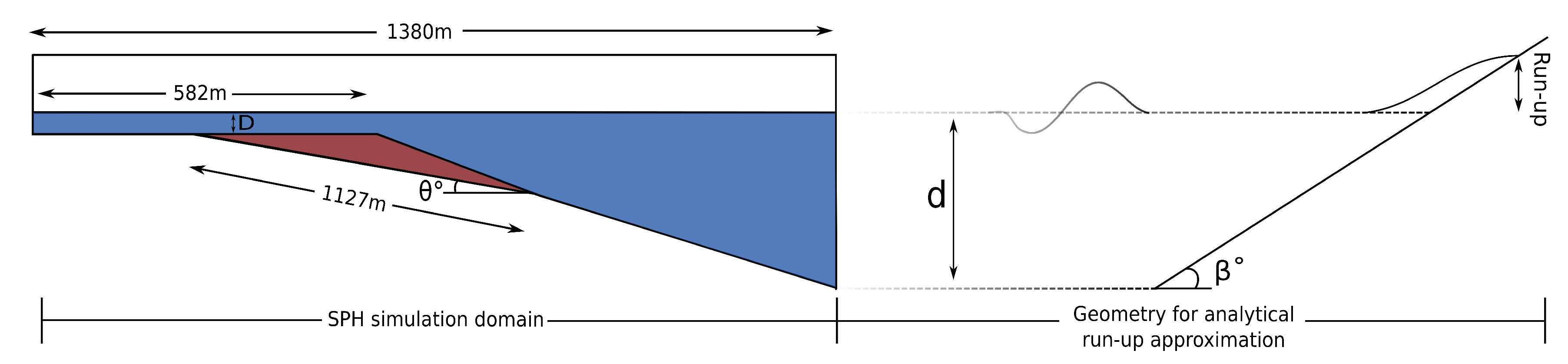
2.1. SPH Modelling of LGWs
- Newtonian: linear viscosity;
- Bingham: linear viscosity plus yield stress;
- Herschel-Bulkley: non-linear viscosity relationship plus yield stress.
2.2. Building the Training Dataset
2.3. Gaussian Process Emulation
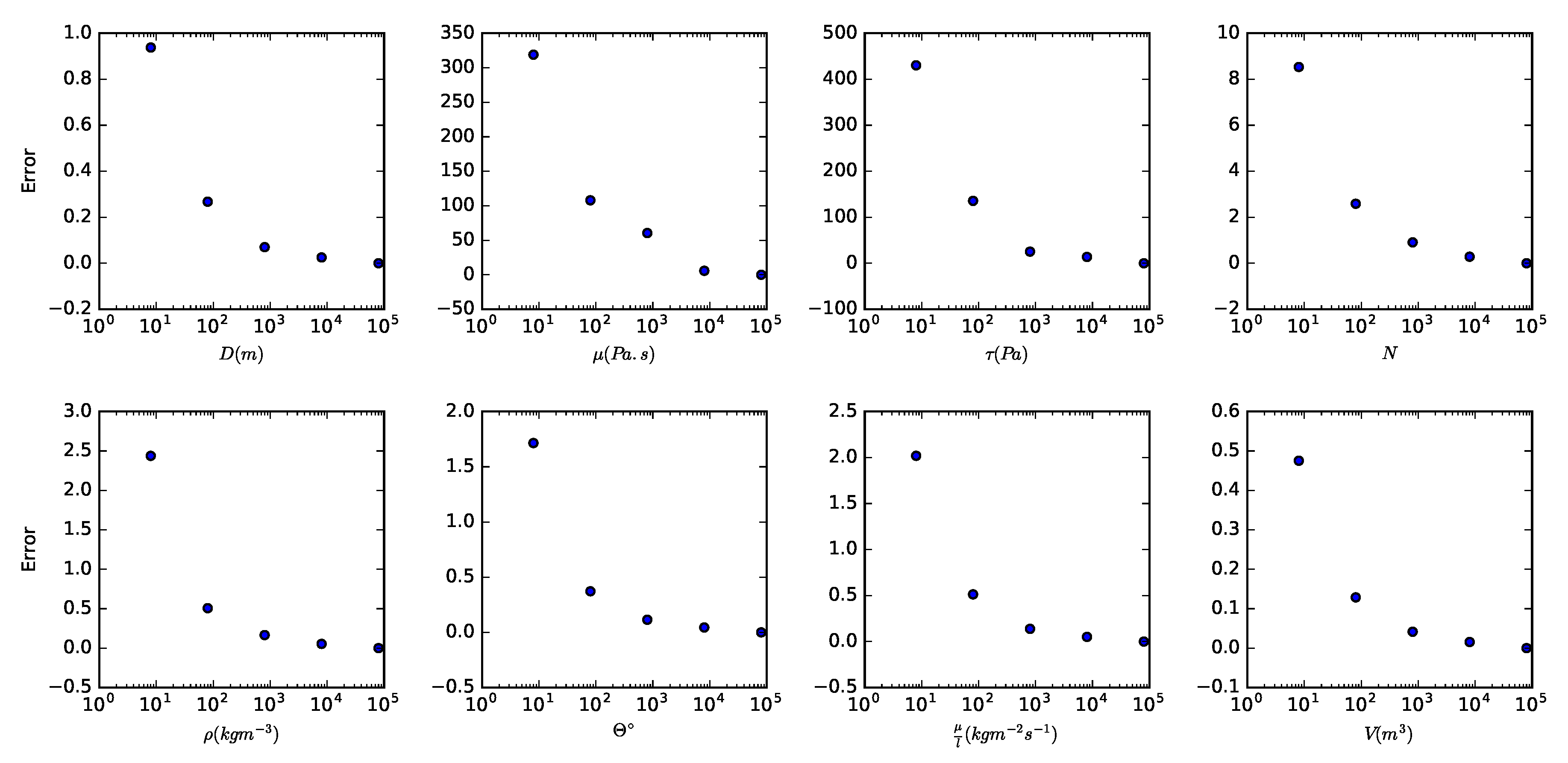
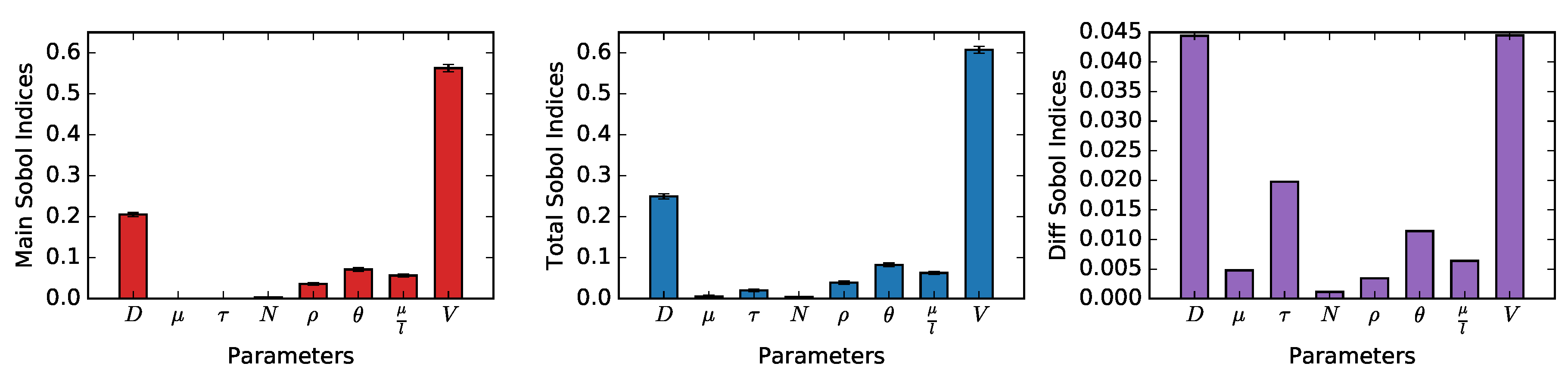
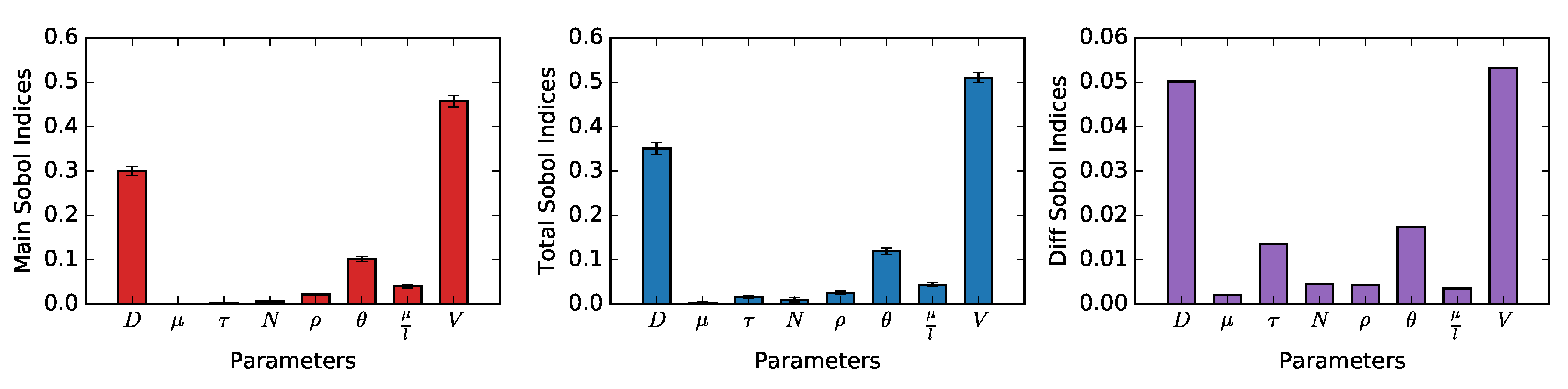
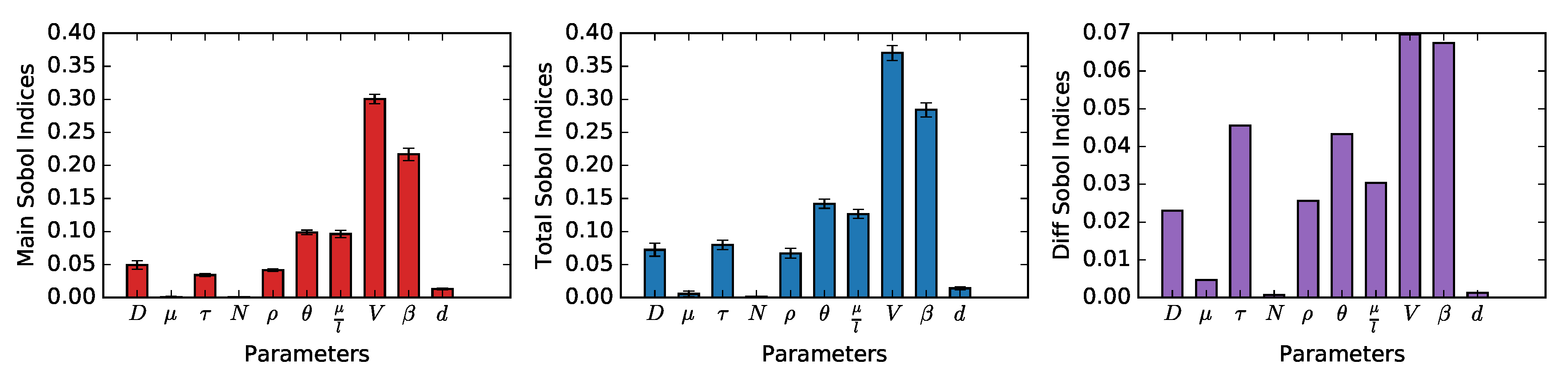
2.4. Variance-Based Sensitivity Analysis
2.5. Alternative Output Metrics
2.5.1. Volume
2.5.2. Run-Up
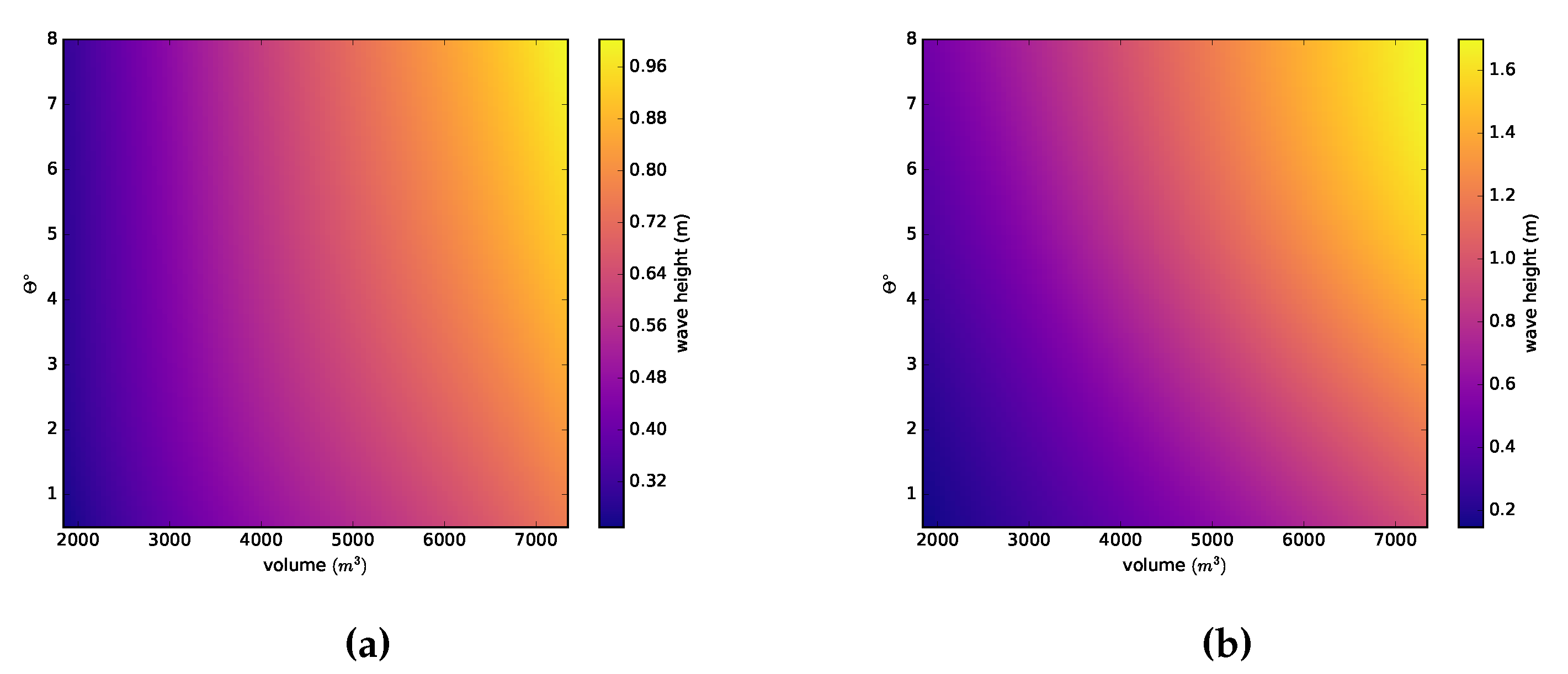
2.6. Analysis of Parameter Interactions
3. Results
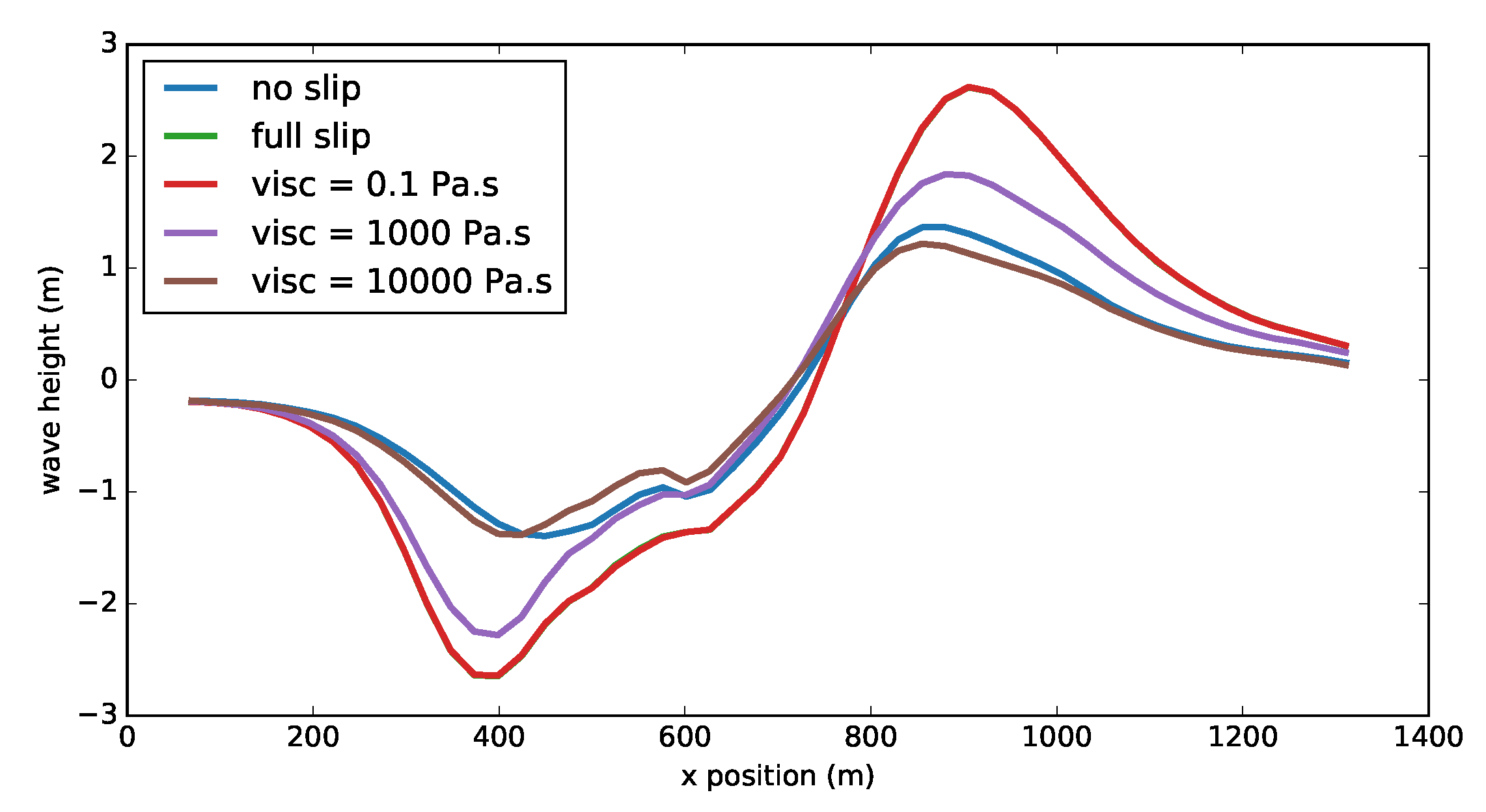
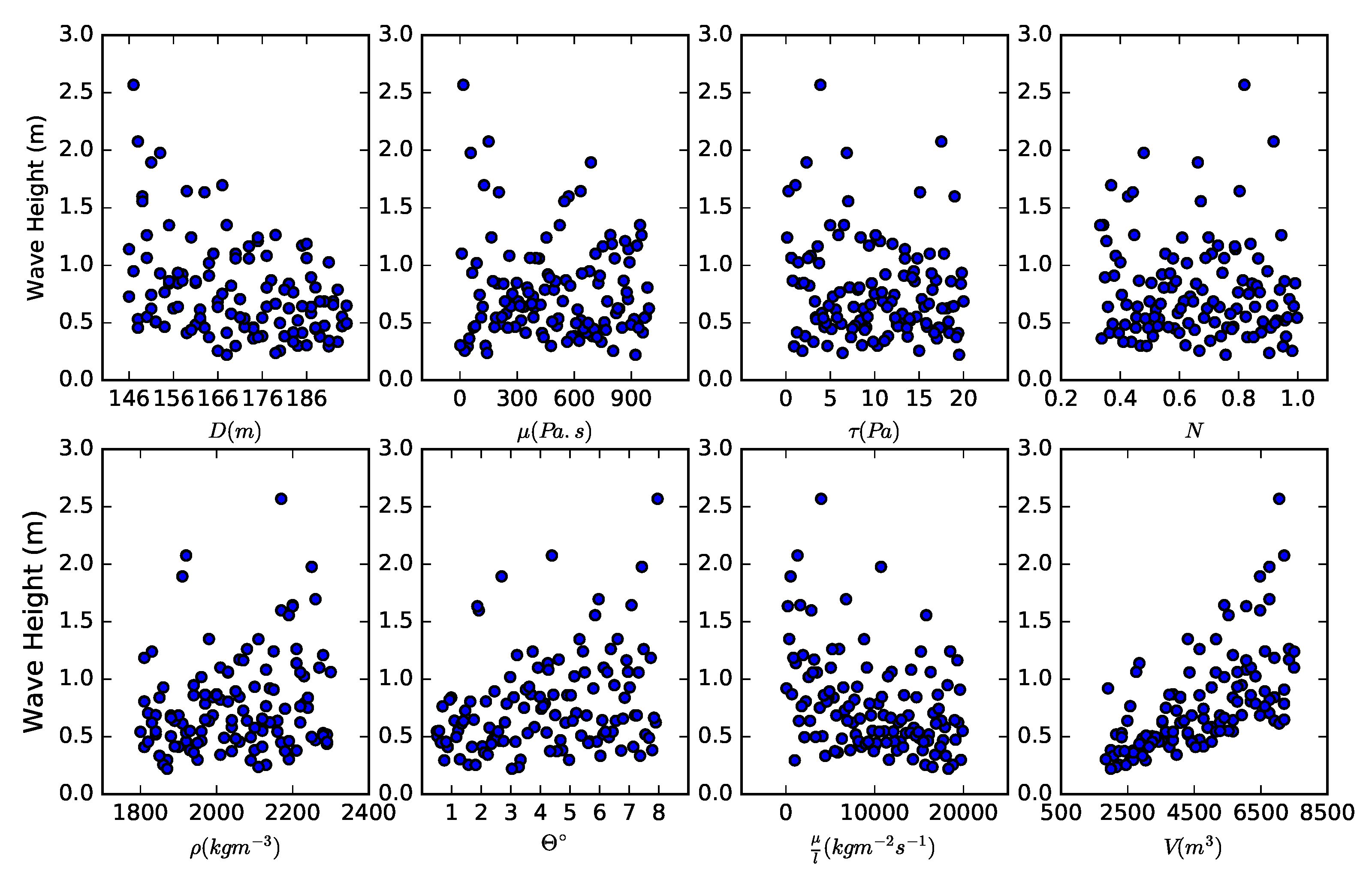
3.1. Wave Height Results
3.2. Alternative Output Metric Results
3.3. Parameter Interactions
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bugge, T.; Belderson, R.; Kenyon, N. The Storegga slide. Philos. Trans. R. Soc. Ser. A 1988, 325, 358–390. [Google Scholar]
- Piper, D.J.W.; Cochonat, P.; Morrison, M.L. The sequence of events around the epicentre of the 1929 Grand Banks earthquake: Initiation of the debris flows and turbidity current inferred from side scan sonar. Sedimentology 1999, 46, 79–97. [Google Scholar] [CrossRef]
- Harbitz, C.; Løvholt, F.; Bungum, H. Submarine landslide tsunamis: How extreme and how likely? Nat. Hazards 2014, 72, 1341–1374. [Google Scholar] [CrossRef]
- Yavari-Ramshe, S.; Ataie-Ashtiani, B. Numerical modeling of subaerial and submarine landslide-generated tsunami waves—Recent advances and future challenges. Landslides 2016, 1–44. [Google Scholar] [CrossRef]
- Ataie-Ashtiani, B.; Najafi-Jilani, A. Laboratory investigations on impulsive waves caused by underwater landslide. Coast. Eng. 2008, 55, 989–1004. [Google Scholar] [CrossRef]
- Grilli, S.; Shelby, M.; Kimmoun, O.; Dupont, G.; Nicolsky, D.; Ma, G.; Kirby, J.; Shi, F. Modeling coastal tsunami hazard from submarine mass failures: Effects of slide rheology, experimental validation, and case studies off the US East Coast. Nat. Hazards 2016, 86, 353–391. [Google Scholar] [CrossRef]
- Wagener, T.; Pianosi, F. What has Global Sensitivity Analysis ever done for us? A systematic review to support scientific advancement and to inform policy-making in earth system modelling. Earth-Sci. Rev. 2019, 194, 1–18. [Google Scholar] [CrossRef]
- Monaghan, J. Smoothed Particle Hydrodynamics and Its Diverse Applications. Annu. Rev. Fluid Mech. 2012, 44, 323–346. [Google Scholar] [CrossRef]
- Neethling, S.J.; Barker, D.J. Using Smooth Particle Hydrodynamics (SPH) to model multiphase mineral processing systems. Miner. Eng. 2016, 90, 17–28. [Google Scholar] [CrossRef]
- Sandia National Laboratories. Dakota, a Multilevel Parallel Object-Oriented Framework for Design Optimization, Parameter Estimation, Uncertainty Quantification, and Sensitivity Analysis: Version 6.5 User Manual; Sandia National Laboratories: Albuquerque, NM, USA, 2016.
- Salmanidou, D.; Guillas, S.; Georgiopoulou, A.; Dias, F. Statistical emulation of landslide-induced tsunamis at the Rockall Bank, NE Atlantic. Proc. R. Soc. A Math. Phys. Eng. Sci. 2017, 473. [Google Scholar] [CrossRef] [Green Version]
- Hristov, P.; DiazDelaO, F.; Saavedra Flores, E.; Guzmán, C.; Farooq, U. Probabilistic sensitivity analysis to understand the influence of micromechanical properties of wood on its macroscopic response. Compos. Struct. 2017, 181, 229–239. [Google Scholar] [CrossRef] [Green Version]
- Murphy, J.; Sexton, D.; Jenkins, G.; Boorman, P.; Booth, B.; Brown, C.; Clark, R.; Collins, M.; Harris, G.; Kendon, E.; et al. UK Climate Projections Science Report: Climate Change Projections; Met Office Hadley Centre: Exeter, UK, 2009.
- Schambach, L.; Grilli, S.T.; Kirby, J.; Shi, F. Landslide Tsunami Hazard Along the Upper US East Coast: Effects of Slide Deformation, Bottom Friction, and Frequency Dispersion. Pure Appl. Geophys. 2018. [Google Scholar] [CrossRef]
- Snelling, B.; Collins, G.; Piggott, M.; Neethling, S. Improvements to a Smooth Particle Hydrodynamics simulator for investigating submarine landslide generated waves. Int. J. Numer. Methods Fluids. in review. [CrossRef]
- Monaghan, J.; Kos, A.; Issa, N. Fluid Motion Generated by Impact. J. Waterw. Port Coast. Ocean Eng. 2003, 129, 250–259. [Google Scholar] [CrossRef]
- Ataie-Ashtiani, B.; Shobeyri, G. Numerical Simulation of Landslide Impulsive Waves by Incompressible Smoothed Particle Hydrodynamics. Int. J. Numer. Methods Fluids 2008, 56, 209–232. [Google Scholar] [CrossRef]
- Capone, T.; Panizzo, A.; Monaghan, J.J. SPH modelling of water waves generated by submarine landslides. J. Hydraul. Res. 2010, 48, 80–84. [Google Scholar] [CrossRef]
- Heller, V.; Bruggemann, M.; Spinneken, J.; Rogers, B. Composite modelling of subaerial landslide-tsunamis in different water body geometries and novel insight into slide and wave kinematics. Coast. Eng. 2016, 109, 20–41. [Google Scholar] [CrossRef]
- Laigle, D.; Coussot, P. Numerical Modeling of Mudflows. J. Hydraul. Eng. 1997, 123, 617–623. [Google Scholar] [CrossRef]
- Sawyer, D.; Flemings, P.; Buttles, J.; Mohrig, D. Mudflow transport behavior and deposit morphology: Role of shear stress to yield strength ratio in subaqueous experiments. Mar. Geol. 2012, 307–310, 28–39. [Google Scholar] [CrossRef]
- Nicolsky, D.J.; Suleimani, E.N.; Haeussler, P.J.; Ryan, H.F.; Koehler, R.D.; Combellick, R.A.; Hansen, R.A. Tsunami Inundation Maps of Port Valdez, Alaska; Alaska Division of Geological Geophysical Surveys: Fairbanks, AK, USA, 2013. [CrossRef] [Green Version]
- Suleimani, E.; Hansen, R.; Haeussler, P. Numerical study of tsunami generated by multiple submarine slope failures in Resurrection Bay, Alaska, during the MW 9.2 1964 earthquake. Pure Appl. Geophys. 2009, 166, 131–152. [Google Scholar] [CrossRef]
- Harbitz, C. Model simulations of tsunamis generated by the Storegga Slides. Mar. Geol. 1992, 105, 1–21. [Google Scholar] [CrossRef]
- Iverson, R. The physics of debris flows. Rev. Geophys. 1997, 35, 245–296. [Google Scholar] [CrossRef] [Green Version]
- Coussot, P.C. Mudflow Rheology and Dynamics: IAHR-AIRH Monographs; AA Balkema Publishers: Rotterdam, The Netherlands, 1997. [Google Scholar]
- Blasio, F.D.; Elverhøi, A.; Issler, D.; Harbitz, C.; Bryn, P.; Lien, R. On the dynamics of subaqueous clay rich gravity mass flows—The giant Storegga slide, Norway. Mar. Pet. Geol. 2005, 22, 179–186. [Google Scholar] [CrossRef]
- Abadie, S.; Morichon, D.; Grilli, S.; Glockner, S. Numerical simulation of waves generated by landslides using a multiple-fluid Navier–Stokes model. Coast. Eng. 2010, 57, 779–794. [Google Scholar] [CrossRef]
- De Blasio, F.V. Introduction to the Physics of Landslides: Lecture Notes on the Dynamics of Mass Wasting; Springer: Berlin, Germany, 2011. [Google Scholar]
- Sobol’, I. On the distribution of points in a cube and the approximate evaluation of integrals. USSR Comput. Math. Math. Phys. 1967, 7, 86–112. [Google Scholar] [CrossRef]
- Sobol’, I. Global sensitivity indices for nonlinear mathematical models and their Monte Carlo estimates. Math. Comput. Simul. 2001, 55, 271–280. [Google Scholar] [CrossRef]
- Homma, T.; Saltelli, A. Importance measures in global sensitivity analysis of nonlinear models. Reliab. Eng. Syst. Saf. 1996, 52, 1–17. [Google Scholar] [CrossRef]
- Bryant, E. Tsunami: The Underrated Hazard; Springer: Berlin, Germany, 2014; pp. 1–222. [Google Scholar]
- Synolakis, C. The runup of solitary waves. J. Fluid Mech. 1987, 185, 523–545. [Google Scholar] [CrossRef]
- Harbitz, C.; Løvholt, F.; Pedersen, G.; Masson, D. Mechanisms of tsunami generation by submarine landslides: A short review. Nor. Geol. Tidsskr. 2006, 86, 255–264, cited By 130. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Lower Bound | Upper Bound |
|---|---|---|
| Submergence depth (D) | 146.0 m | 196.0 m |
| Viscosity () | 1.0 Pa s | 1000.0 Pa s |
| Yield stress () | 0.0 Pa | 20,000.0 Pa |
| Shear thinning exponent (N) | ||
| Density () | 1800.0 kg m−3 | 2300.0 kg m−3 |
| Slope angle—source () | 0.5° | 8.0° |
| Boundary layer viscosity/length scale () | 0.2 kg m−2 s−1 | 20,000.0 kg m−2 s−1 |
| Volume (V) | 1839.75 m3 | 7347.25 m3 |
| Open ocean water depth (d) | 100 m | 500 m |
| Slope angle—inundation () | 0.5° | 8.0° |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Snelling, B.; Neethling, S.; Horsburgh, K.; Collins, G.; Piggott, M. Uncertainty Quantification of Landslide Generated Waves Using Gaussian Process Emulation and Variance-Based Sensitivity Analysis. Water 2020, 12, 416. https://doi.org/10.3390/w12020416
Snelling B, Neethling S, Horsburgh K, Collins G, Piggott M. Uncertainty Quantification of Landslide Generated Waves Using Gaussian Process Emulation and Variance-Based Sensitivity Analysis. Water. 2020; 12(2):416. https://doi.org/10.3390/w12020416
Chicago/Turabian StyleSnelling, Branwen, Stephen Neethling, Kevin Horsburgh, Gareth Collins, and Matthew Piggott. 2020. "Uncertainty Quantification of Landslide Generated Waves Using Gaussian Process Emulation and Variance-Based Sensitivity Analysis" Water 12, no. 2: 416. https://doi.org/10.3390/w12020416